こんにちは、青山です。
2017年06月13日〜2017年06月19日の5日間(土日のぞく)、
福岡で開催された自動運転システム構築塾(Tier IV Academy)に参加してきました。
自動運転システム構築塾とは
自動運転のソフトウェアやセンサーを手がけるベンチャー企業である「ティアフォー(Tier IV)」が、日経BP社と手を組んで開催する自動運転システムの構築セミナーでした。

会場はヒルトン福岡シーホーク!
写真・動画の撮影は自由(フリー)!
コーヒーおかわり自由
お茶もお代わり自由

お昼はお弁当が頂けました
実際の講義のテキストや動画など詳しい内容は上述の自動運転システム構築塾のサイトにて公開されてますので、
詳しい内容はそちらを見ていただいて、ここでは「どんな感じだったか」を伝えさせてもらえればと思います。
1日目
まずはTierIVのCEOである加藤真平さん(名古屋大学大学院 情報科学研究科 准教授)から自動運転についての講義が聞けました。
自動運転システム構築塾(Tier IVアカデミー)の取り組みについての説明、
オープンソースとして開発中の自動運転システムのミドルウェア(フレームワークといっても良いかもしれません)である「Autoware」についての概要や、今後の展望についてなどがしっかり聞けました。
(この辺り、写真撮影OKであることを知らず、ほとんど撮影しておりません。すみません)
そのあとに、具体的に自動運転システムをどう構築していくかの講義も聞くことができました。
自己位置推定について
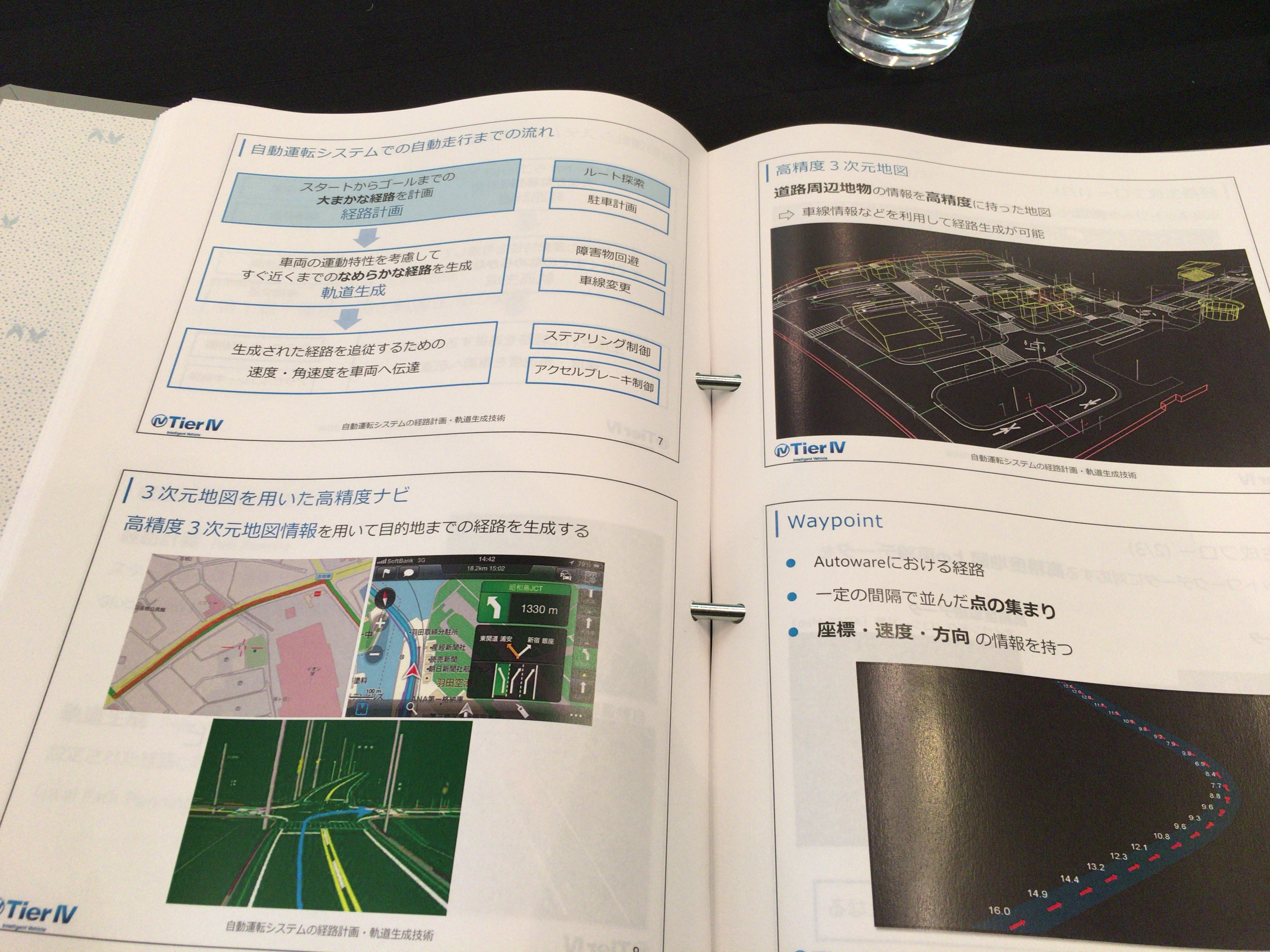
経路形成について
1日目に印象に残ったポイントは、下記の3点です。
- 自動運転は地図座標上のどの地点にいるかの精度が数10cmレベルで求められる
- 自動運転の物体認識でもカメラ画像をAIを使って判定する
- 自動運転ではカーナビの地図とは違ってより高精度且つ3次元の地図データが必要である
2日目
2日目はROS(Robot Operating System)について、実際にC++でのコーディングをしながら教わりました。
ROSは自動運転だけではなくロボット開発で多く使われているミドルウェアだそうで、
各パーツ間のデータのやり取りの制御やデータを視覚化するツール、豊富なパッケージ(デバイスドライバやライブラリ)があるそうです。

座席にパソコンが用意されてました!
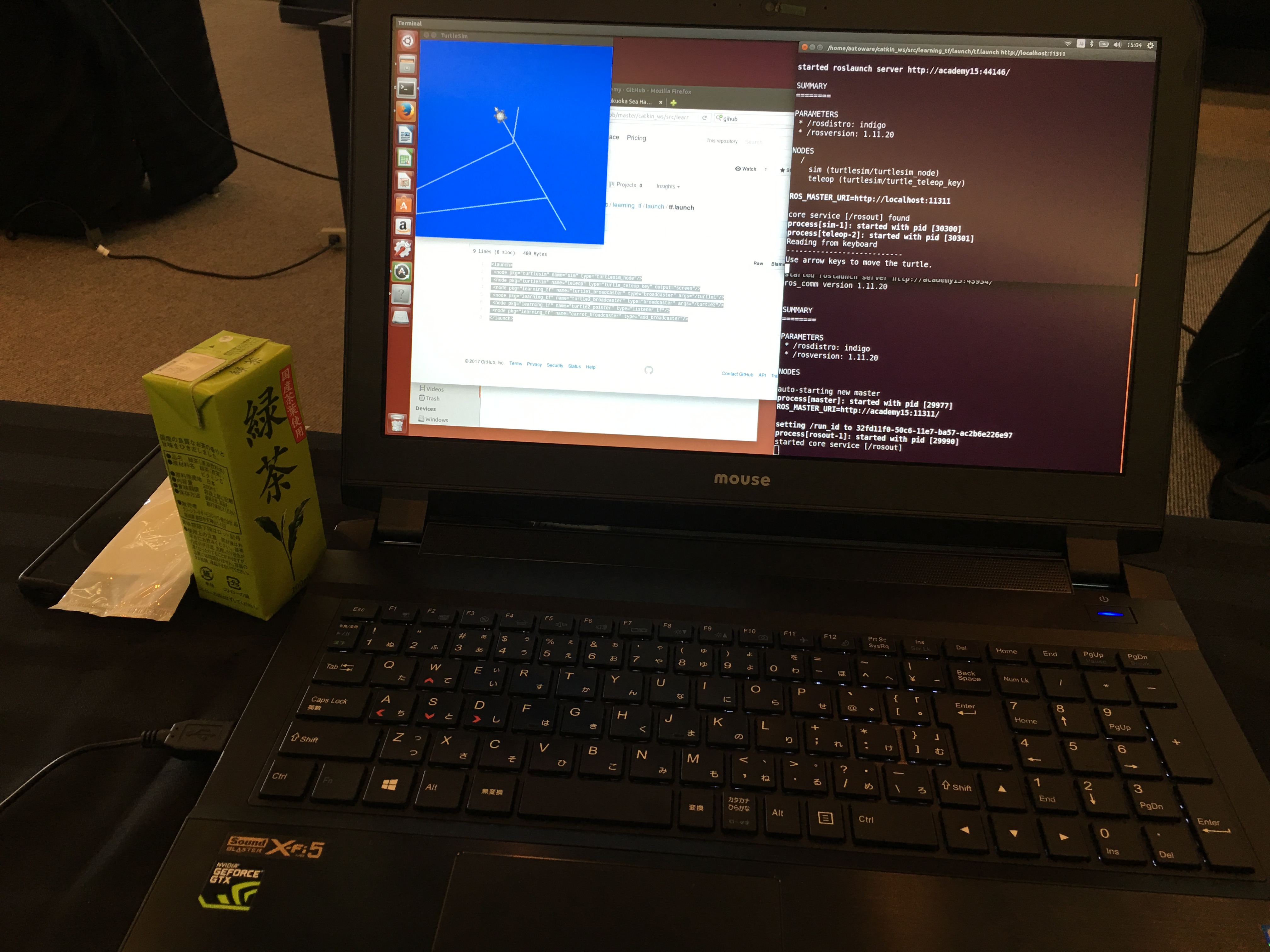
コーディングして動作確認!
2日目に印象に残ったポイントは、下記の3点です。
- コーディングして実際に動作が見れるのってやっぱり楽しい
- カメラやセンサーなどからデータが流れ続けてくる状態で各処理を繋いでいく形でナルホドと思った
- 久々にUbuntu(LinuxのOS)を触れて楽しかった
3日目と4日目
3日目と4日目はAutowareを使った操作を学びました。
実際の車に乗り込んでAutowareで自動運転を操作するのではなく、ROSに搭載されているデータの流れを記録・再生する機能を利用して実際に走行した時に取得した記録を再生させる形でAutowareの操作を学びました。
センサーキャリブレーション
車に取り付けてあるカメラとレーザーの相対位置関係を自動運転システムは把握しておく必要があります。
チェスボードを持つ人が車の前に立った状態でカメラとレーザーで撮影します。
カメラ画像は自動でチェスボードを認識できるんですが、レーザーで取得した点群データからチェスボードを自動で判定することはまだできないそうで、
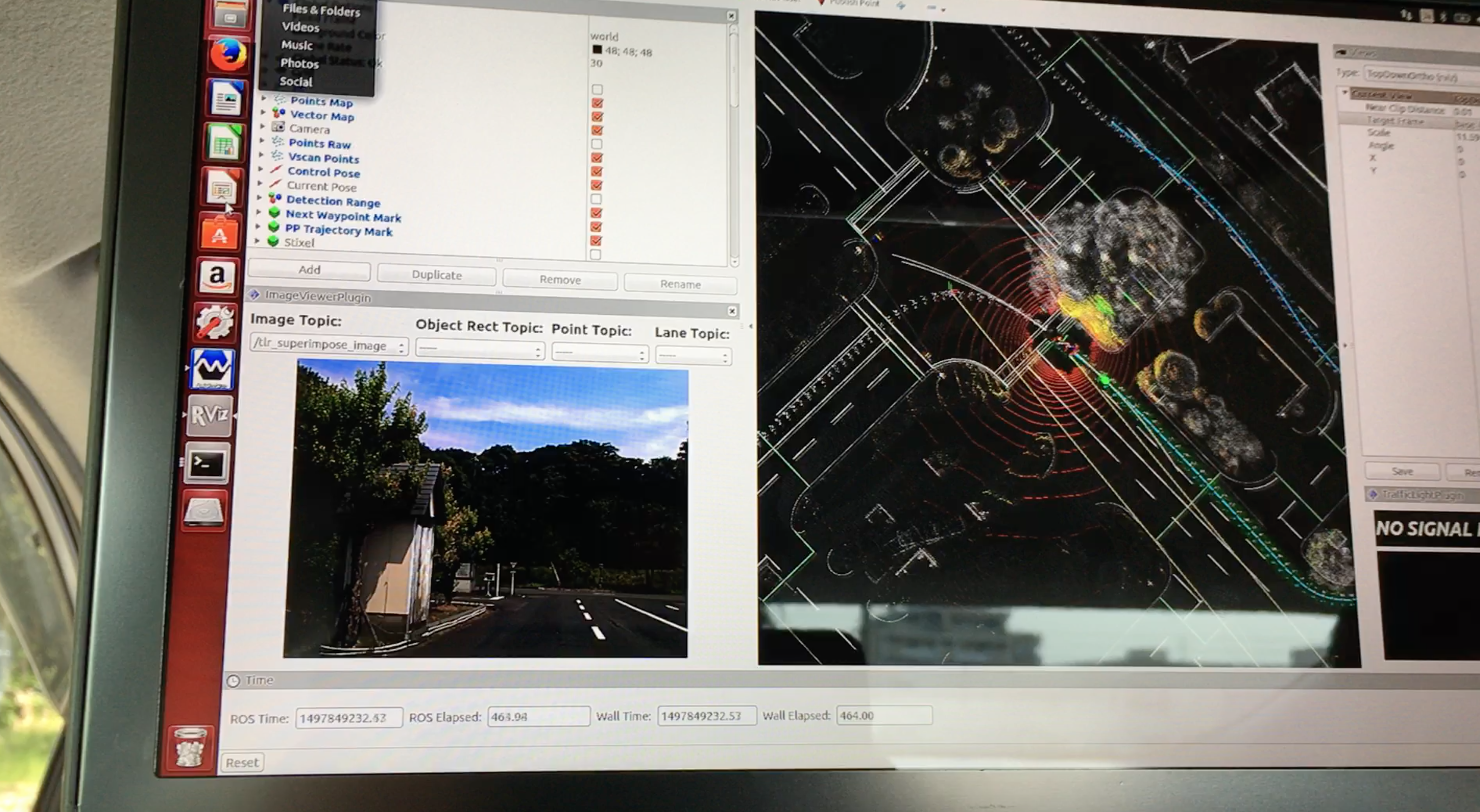
点群データを可視化した画面をマウスでクリックすることで自動運転システムにチェスボードの位置を伝えます。
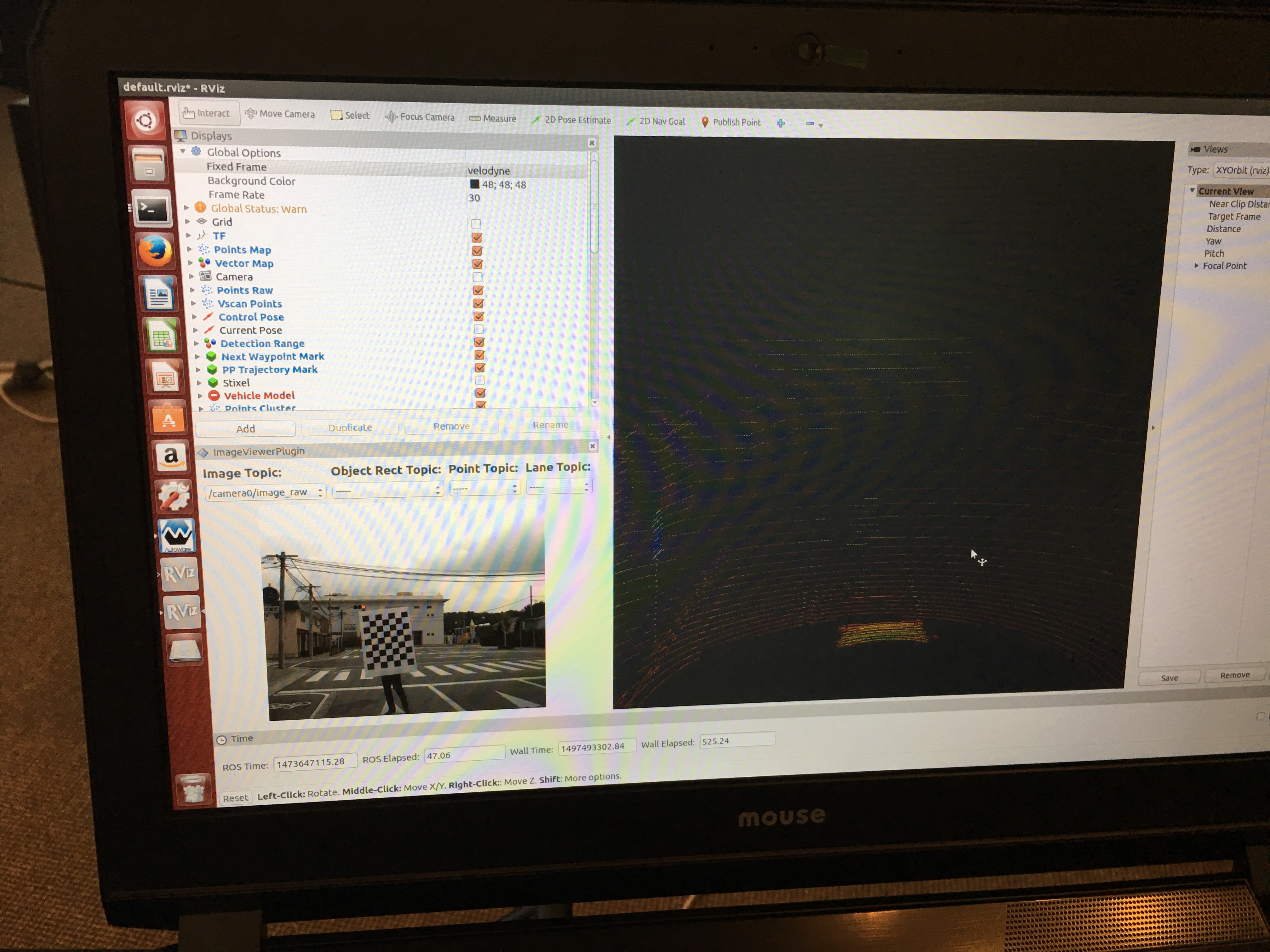
チェスボードを持つ人
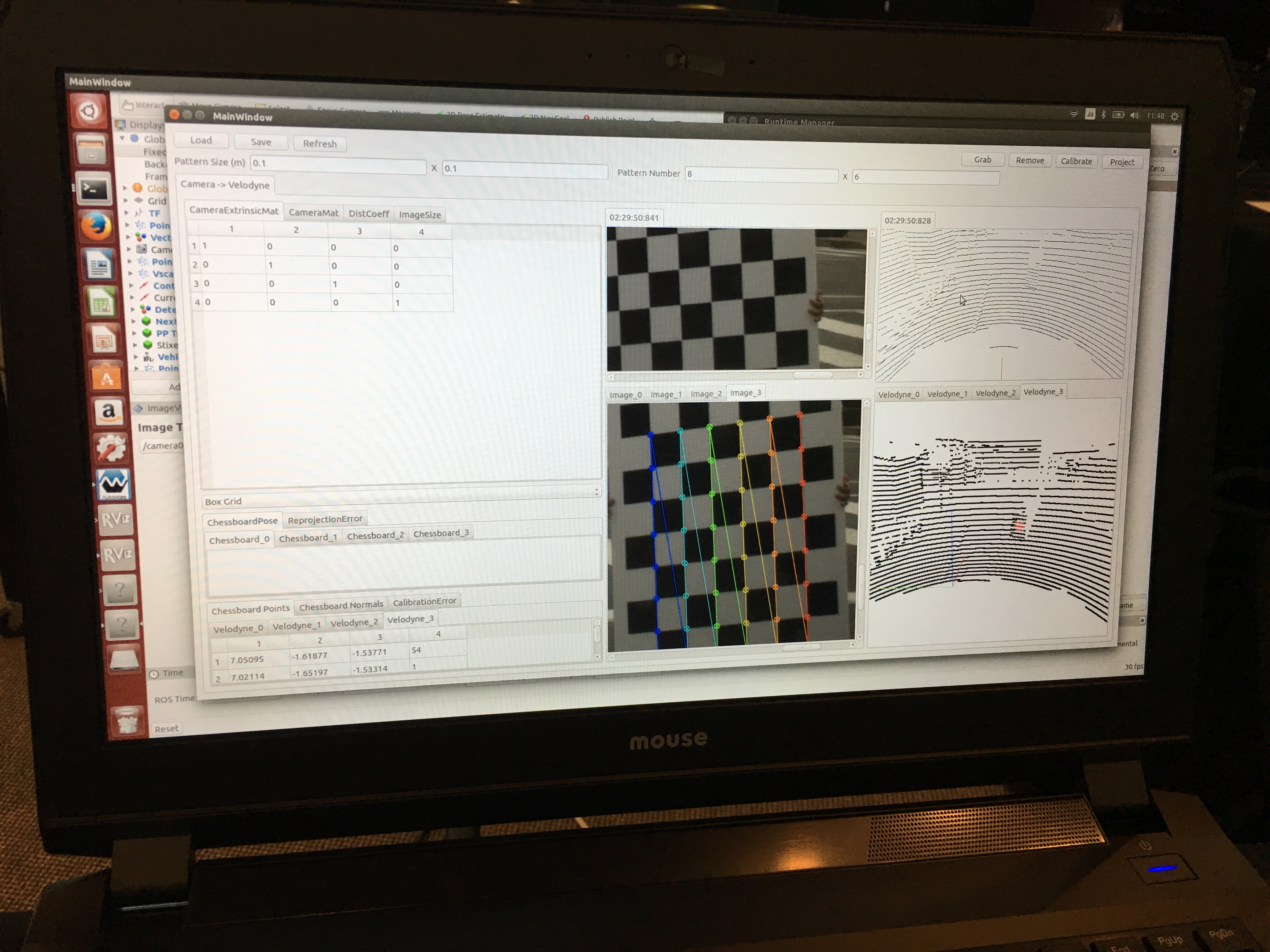
カメラの画像とレーザーの点群データ

センサーキャリブレーションの絵

自動運転カー
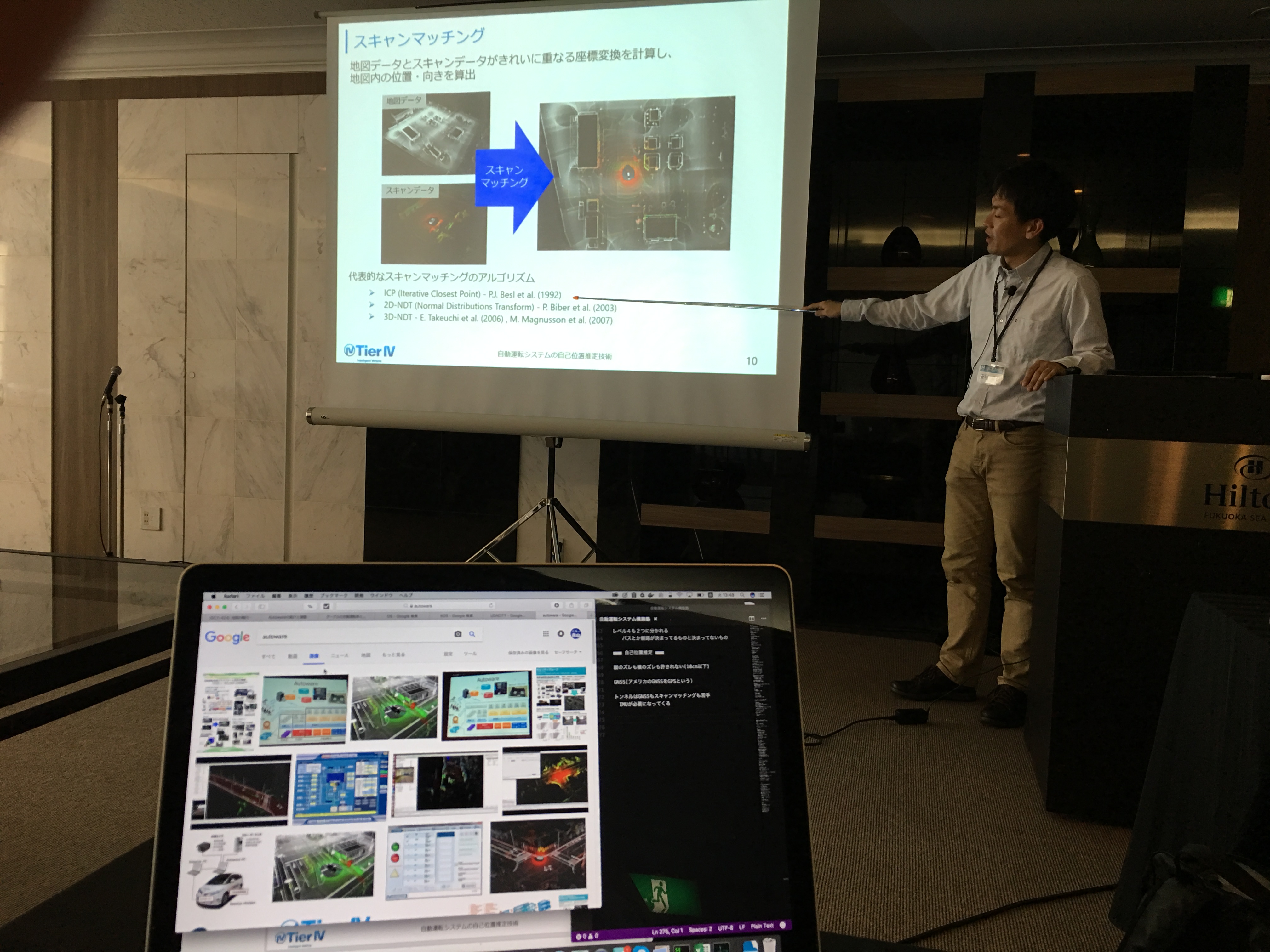
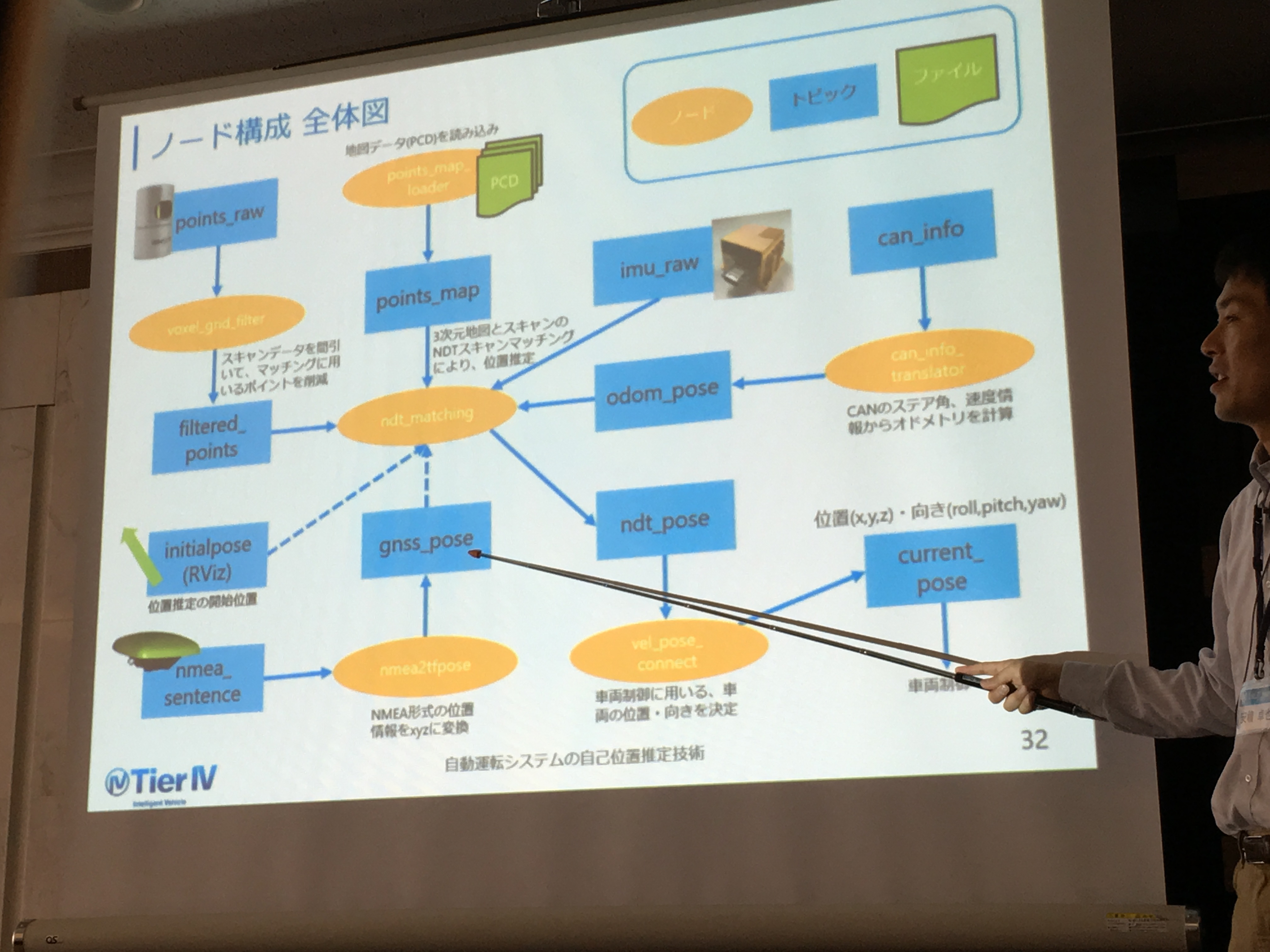
自己位置推定
車が地図の座標上のどこにいるかを推定する自己位置推定についてAutowareでのやり方を学びました。
GPSを使う方法とレーザで取得した点群データと3次元地図を比較するスキャンマッチングという方法があるのですが、
ここではスキャンマッチングのやり方を学びました。
3日目、4日目に印象に残ったポイントは、下記の3点です。
- センサーキャリブレーションはなんとか自動化したいなと思った
- GPSはビルに囲まれてたりすると精度が落ちる。レーザーは周りに何もないと自己位置推定できないなど一長一短ある
- 3次元地図を視覚化した絵の中を自己位置推定した位置に車を表示するのはゲーム感覚で楽しかった
5日目
いよいよ最終日。5日目はヒルトン福岡シーホークではなく南福岡自動車学校にお邪魔しました。
午前中に講義・講演を聞いて、午後からいざ自動運転車に試乗してきました!!!

南福岡自動車学校

レーザーとGPS機械
トランクの中はこんな感じ
自動運転車の車内
5日目に印象に残ったポイントは、下記の3点です。
- 1組ずつ車の機材の説明や自動運転システムの実際のセットアップ、操作を行うので自動運転の乗車時間が少しだったのが残念。もっと乗りたい!
- 信号に差し掛かると車内のモニターに信号の色をちゃんと判定できてる絵が出ておぉ!と思った
- 当日は凄く暑くて車内のパソコンがオーバーヒートして自動運転が止まっちゃうという問題が発生!それも面白かったです
まとめ
オープンソースであるAutowareですが、かなりのところまで作り込まれていて凄いなと実感しました。
また、ROS(Robot Operating System)によって各機能(自己位置推定や物体検出)が独立して作り込めるので、
ソフトウェア技術者としてどこかの一分野に入り込みたい!と強く思いました。
スマートフォンのようにOS周りは全部アメリカの企業に持っていかれちゃうと面白くないので、
Autowareを応援し続けていきたいと思います。今後の動向も要チェックですね。
おまけ
福岡での5日間、ラーメン美味しかったです♪
ラーメン5 春吉店

一蘭 キャナルシティ博多店

博多一幸舎 博多デイトス店

ShinShin 博多デイトス店